Karena Saya Sering iseng Dengan Mengutak-atik Bahan Elektronik, saya pun membuat suatu rangkaian anti maling yg cukup unik. Rangkaian ini bekerja berdasarkan Sensor, terdiri dari 2 bagian.
Yaitu Bagian Pemancar Infrared Dan Bagian Penerima, jika Sensor tersebut di lewati/terhalang benda/manusia maka sensor tersebut akan berbunyi. Pengalaman saya waktu rumah saya Kemalingan sangat menggelikan. Waktu itu maling sudah masuk kerumah, saat melintasi sensor alarm pun berbunyi, Malingnya kesibukan mencabut cok listrik disekitarnya tetapi alarm tidak mau mati juga. Akhirnya terperogok oleh orang tua saya, Malingnya langsung melarikan diri. Sementara dalam waktu yg sama Orangtua Saya pun Lari masuk kekamar Dan mengunci kamar sambil berteriak maling.
Orang Tua Saya Lari Karena Tidak tahu berapa banyak maling yg masuk kerumah, jika satu masih bisa dilawan tetapi kalau ada dua atau tiga bagaimana melawannya ( pikir orang tua saya ) lebih baik lari mencari tempat yg aman.
Beruntung Sensor yg saya pasang sangat berguna. Jika Teman-teman Mau membuatnya sendiri nanti saya posting rangkaiannya. Gampang kok Cara membuatnya. Modalnya tidak sampai Rp.100.000 jika merakit sendiri.
Adapun komponen yg diperlukan adalah sebagai berikut :
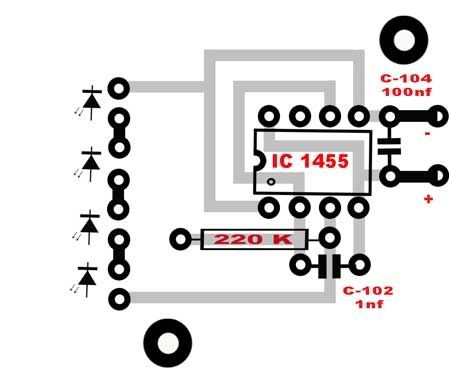
Gambar sensor pemancar dilihat dari atas
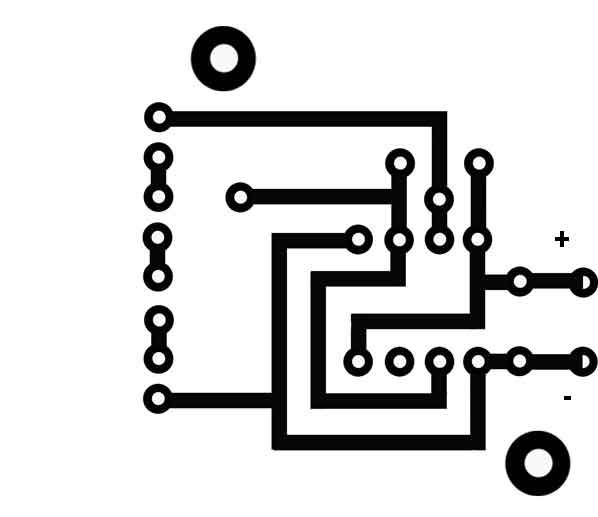
Gambar sensor pemancar dilihat dari bawah
Komponen Rangkaian Pemancar
R1………………………….220k
C1……………………..….1 Kpf
C2………………………100 Kpf
IC……………………..MC-1455
D1,2,3,4………………Infra Red
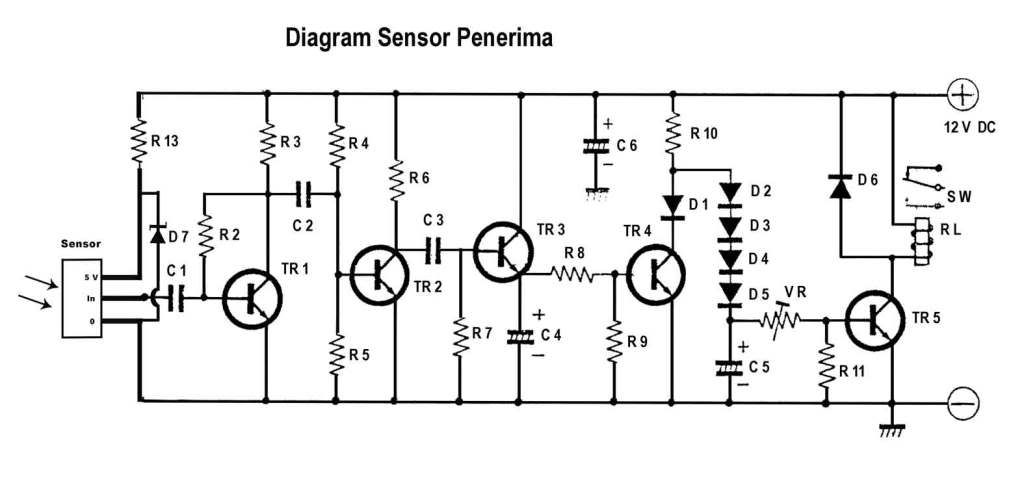
Gambar Sensor Penerima Dilihat dari atas
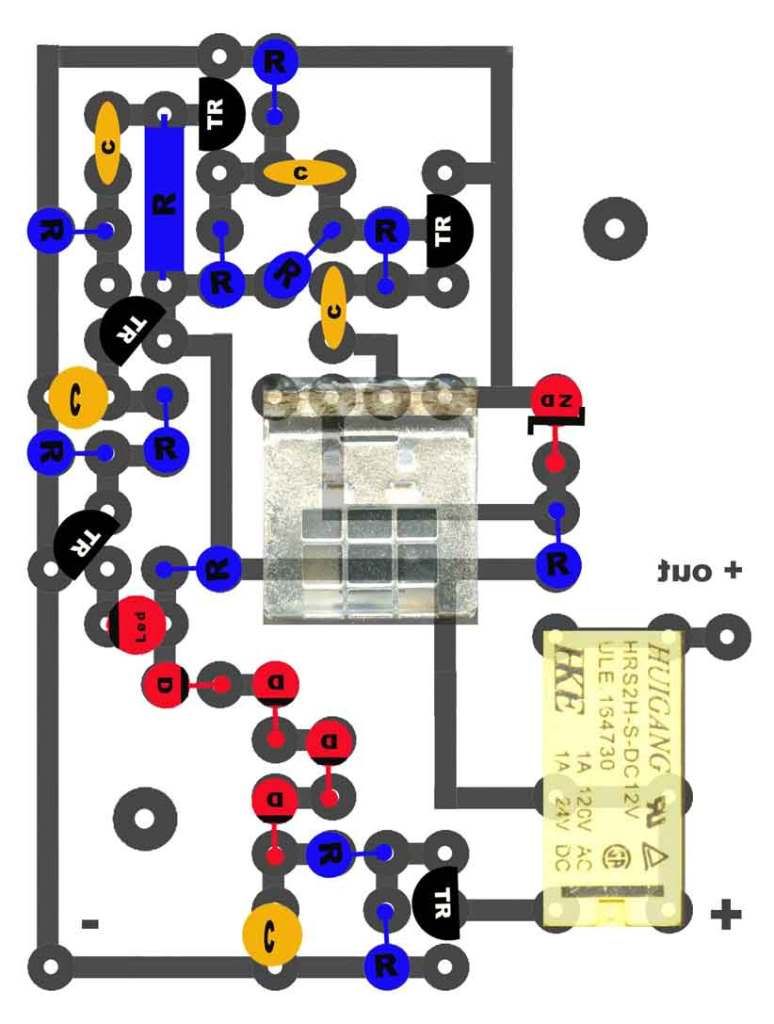
Gambar Sensor Penerima dilihat daribawa
Komponen Rangkaian Penerima
R1………………………..220k
R2………………..….….470k
R3…………………..…….33k
R4, 7…………………….180k
R5, 11………………….….47k
R6………………………….22k
R8…………….…..470 ohm
R9, 10……………………….1k
R12 ……………………….4.7k
R13………………………….1 K
C1………………………4,7Kpf
C2……………………….10Kpf
C3……………..……….33Kpf
C4…………..……………10 uf
C5, 6………………….100 uf
Tr1, 2, 3, 4……….…..C828
Tr5………………….….C1815
D1…………………….…..LED
D2, 3, 4, 5, 6……..1N4148
D7………………….Zd 5.1 V
Relay…………….….6 V / 12 V
Sensor …………..… TV/Vcd
Ini adalah gambar yg sudah jadi






yang saya penggang di tangan adalah bagian dari penerima dilihat dari depan dan dari belakang.


gambar dibawah ini adalah rangkaian penerima dan tempatnya.

ini adalah gambar dari rangkaian pemancar infra red yg sudah jadi




dan yg terakhir ini adalah gambar rangkaian yg sudah siap di pasang.
banyak ya !! maklum dapat orderan buat pasang di rumah wallet.

sampai disini dahulu ya…
sorry kalau ada yg menunggu terlalu lama update yg terbaru dari saya. Soalnya terlalu sibuk bekerja.
Selamat Mencoba !!! jika tidak mengerti silakan tinggalkan pesan atau saran dari pembaca.
Mudah-mudahan gue balas…!!
12-06-2013
Ternyata banyak juga peminatnya,
Oke ini hasil yg sudah saya perbaiki dan saya perbaharui sensor penerima
& sensor pemancar infra rednya yang uda gak pakai ic mc 1455 tapi
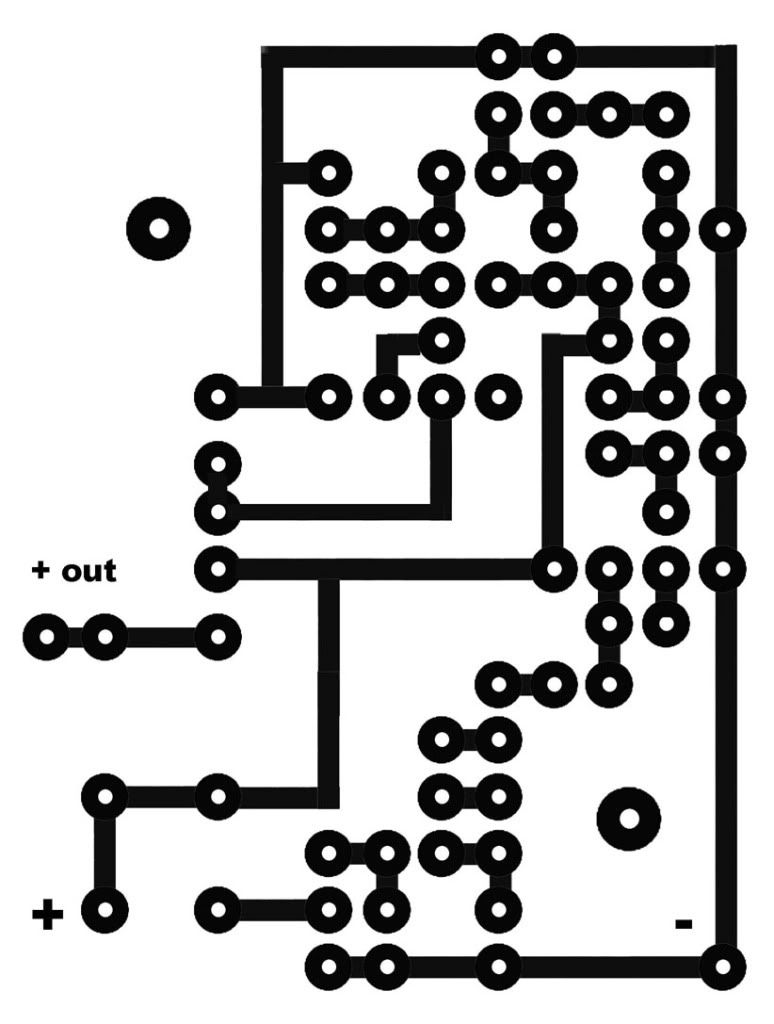
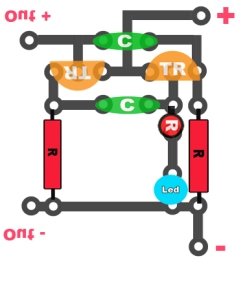
pake rangkaian flip flop 2 Tr


Di lihat dari bawah

Di lihat dari atas.
untuk komponen pemancarnya adalah sebagai berikut :
Tr ……………………..c 828 x2
R …………………….. 22 k x2
c …………………….. 33nF x2
R (yg bulat ) ……… 470 ohm lihat gambar
Led …………………. Lampu led ( jangan pasang terbalik ya…. )
tegangan masuk 12 volt
out nya pakai lampu infrared 4 bh
di seri ( ingat di seri ) dan jangan pasang terbalik ( salah satu
terbalik infra red gak bakalan berfungsi )
kalau ada yg mau pesan siap jadi juga bisa tapi order dulu ya soalnya buatnya manual gak pake mesin he..he..he…….
siap jadi Rp 375.000 lain ongkir
hubungi email saya sakuraqnet@gmail.com
oke sampai disini aja dulu,
mohon maaf kalau ada comment yg gak sempat saya balas
Salam dan TerimaKasih.